Indoor personal mobility robot
Indoor-type personal mobility is equipped with many sensors: 1. to know whether the object on the seat is human body or not, 2. to detect the center of gravity of the human body, the rotation of the seat, and the position of soles, 3. and to enable the driver to steer the robot only by his own body movement.
Position recognition with floor pattern
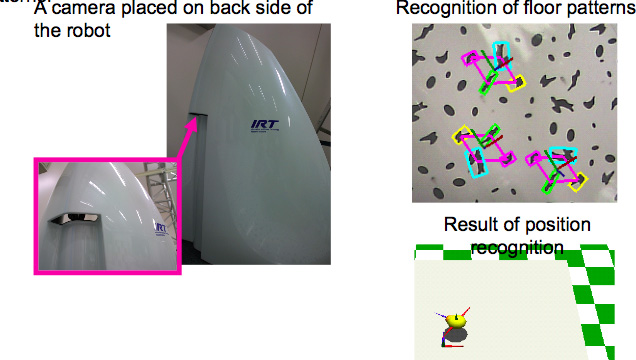
Robot position is calculated based on the visibility of the floor pattern.
Recognition of hand beckoning

The robot recognizes the user's beckoning and approaches.
Publications
- Tomoyuki Takahata, Akihito Nakai, Yoshiyuki Ohmura, Atsuhshi Hiyama, Nobuyasu Tomokuni, Kohei Okabe, and Kiyoshi Matsumoto “Haptic steering interface of indoor personal mobility robot,” The 27th annual conference of the Robotics Society of Japan (RSJ2009) (Japanese domestic conference), 2009.
- LINK: website of IRT Reserach Inisiative, The University of Tokyo