Boarding mobility robots

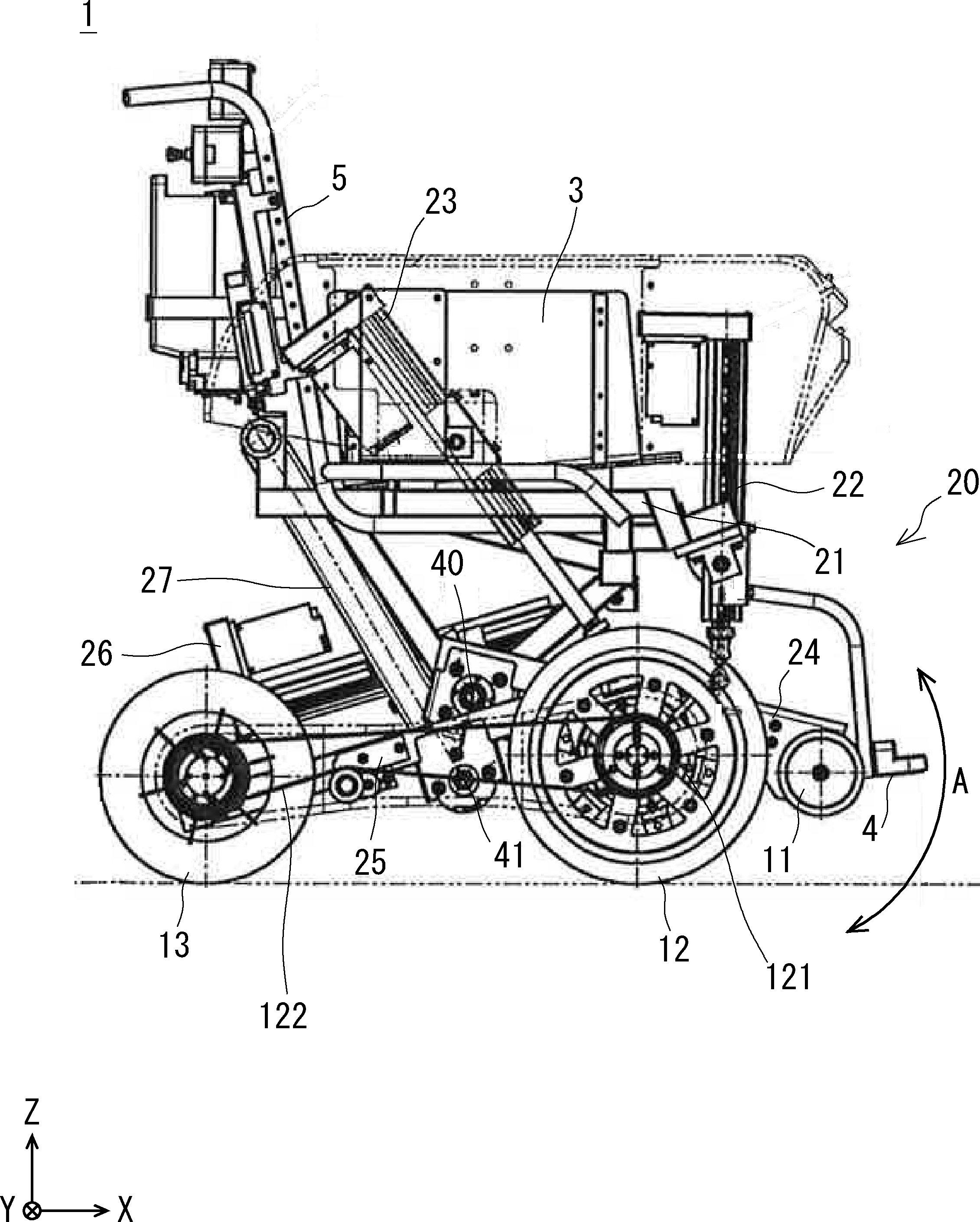
We report on a mechanism of a wheelchair type robot that can be adapted to escalators and low-floor buses. The transport capacity of the escalators is larger than that of elevators. The low-floor buses are suitable for wheelchair users; however, drivers of the buses need to set up a slope to pass through the wheelchair. In literature, many types of leg-wheel type robots were developed to overcome the barriers such as staircases and trains. To be adapted to escalators using three steps, the height difference between front and rear wheels are 400 mm. The step heights of the entrance of the low-floor buses are about 120 mm. Here we show a mechanism to be adapted to escalators and low-floor buses with limited number of actuators: five linear actuators and two driving wheels.
Publication:
- (US patent) Tomoyuki Takahata, Masaru Ishikawa, Yoshiyuki Senba, Takashi Izuo, and Yusuke Kosaka, “Traveling vehicle and method of controlling the traveling vehicle,” no. 10266097. (Registerd on 23 April 2019)
- (US patent) Masaru Ishikawa, Kiyoshi Matsumoto, Tomoyuki Takahata, Isao Shimoyama, Takashi Izuo, Yoshihiro Kuroki, Taro Takahashi, and Yusuke Kosaka, “Travelling apparatus,” no. 10137042. (Registerd on 27 November 2018)
- Tomoyuki Takahata and Isao Shimoyama, “Mechanism of a wheel-chair type mobility robot adapted to escalators and low-floor buses,” IROS2017, 2017. (Open poster)
- Tomoyuki Takahata, Masaru Ishikawa, Kiyoshi Matsumoto, Isao Shimoyama, “Boarding mobility robot adapted to public facilities like escalators,” The 34th annual conference of the Robotics Society of Japan (RSJ2016), 1D1-05, 2016. (Japanese domestic conference)
We, team UT-MOBIRO, perticipated CYBATHLON Wheelchair Series Japan 2019.
In order to realize an electric wheelchair that can get on and off a low-floor bus or universal cab from the road surface without a ramp, a boarding mobility robot was designed and prototyped, and experiments showed that it can climb up and down a 340 mm-high step.
Publication:
- (US patent) Tomoyuki Takahata, Yusuke Kosaka, and Takashi Izuo, “Travelling apparatus,” no. 11471343. (Registerd on 18 October 2022)
- Tomoyuki Takahata and Tatsuya Harada, “Boarding mobility robot capable of ascending and descending large steps in public transportation,” The 40th annual conference of the Robotics Society of Japan (RSJ2022), 4H1-01, 2022. (Japanese domestic conference)